Overview
A comprehensive computer vision assignment implementing five foundational algorithms: Harris Corner Detection, Image Pyramids, ORB feature detection, SIFT keypoint detection, and YOLOv5 real-time object detection on the COCO dataset.
Q1 — Harris Corner Detection
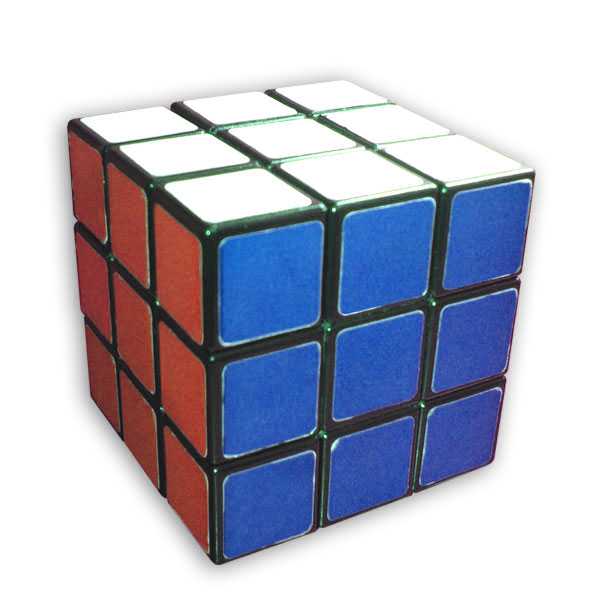
The Harris algorithm detects corners by analysing local intensity changes in multiple directions. Applied to a Rubik's Cube image — a geometrically rich subject with many well-defined corners. All 27 visible faces and edge intersections were correctly detected.
corners = cv2.cornerHarris(image, blockSize=2, ksize=3, k=0.04) corners = cv2.dilate(corners, None) image_with_corners[corners > 0.01 * corners.max()] = [0, 0, 255]
Q2 — Image Pyramid
Gaussian image pyramid constructed over 6 downsampling levels using cv2.pyrDown(). Applied to a building photograph to demonstrate multi-scale image representation — foundational for scale-invariant detection and image blending.

Q3 — ORB Feature Detection
SURF is patent-restricted in OpenCV, so ORB (Oriented FAST and Rotated BRIEF) was used as a free, high-performance alternative. ORB detects keypoints and computes binary descriptors suitable for fast matching.
orb = cv2.ORB_create() keypoints, descriptors = orb.detectAndCompute(gray, None) img_with_keypoints = cv2.drawKeypoints( image, keypoints, None, (255, 0, 0), flags=cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS )
Q4 — SIFT Keypoint Detection
SIFT (Scale-Invariant Feature Transform) detects and describes local features invariant to scale, rotation, and illumination changes. The rich circular keypoint visualisation shows scale and orientation for each detected feature.
sift = cv2.SIFT_create() keypoints, descriptors = sift.detectAndCompute(gray, None) img_with_keypoints = cv2.drawKeypoints(image, keypoints, None)
Q5 — YOLOv5 Object Detection (COCO Dataset)
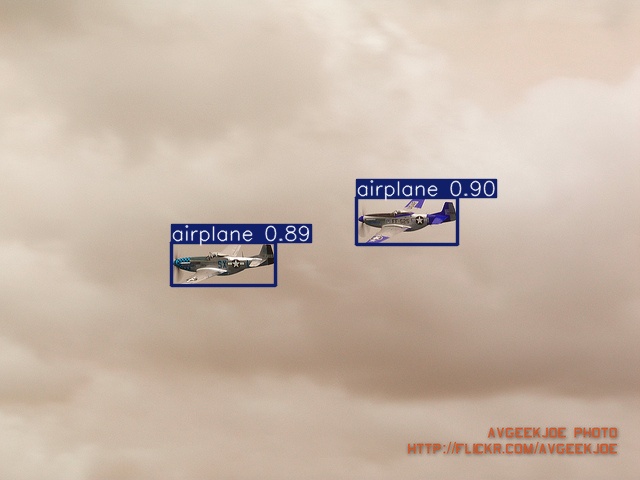
YOLOv5 (via Ultralytics) was loaded with pre-trained weights and run on 5 test images from the COCO dataset. YOLO performs single-pass detection — classifying and localising all objects in one forward pass.
from ultralytics import YOLO model = YOLO("yolov5s.pt") results = model(img_rgb) boxes = results[0].boxes # boxes.cls → class IDs # boxes.xyxy → bounding box coords # boxes.conf → confidence scores
YOLO Detection Results
- Image 1 — 1 person, 1 skateboard detected (conf: 0.82, 0.71)
- Image 2 — 3 persons, 3 elephants detected (conf up to 0.93)
- Image 3 — 1 apple, 1 orange detected (conf: 0.85, 0.52)
- Image 4 — 2 persons, 5 cows detected (conf up to 0.91)
- Image 5 — 2 airplanes detected (conf: 0.90, 0.89)
Tech Stack
opencv-python4.10 — Harris, pyramids, ORB, SIFTultralytics8.3 — YOLOv5 inferencetorch2.4 +torchvision— deep learning backend- COCO dataset — 80 object classes, industry-standard benchmark
- Google Colab — execution environment